[코리아포스트 한글판 최남석 선임기자] 오하이오 소재 계약 제조업체가 비전 카메라가 장착된 유니버설로봇의 UR10 협동로봇을 사용해 자동차 엔진의 하위 부품 제조에 대한 100% 품질을 달성했다.
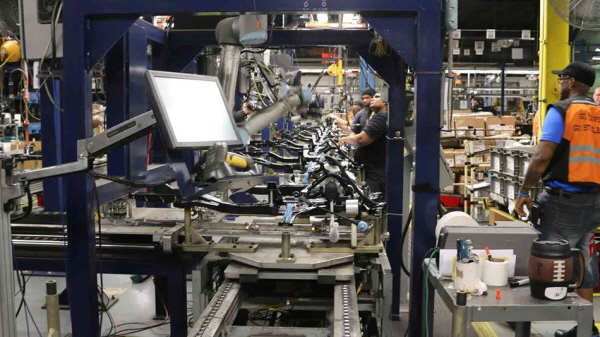
오하이오 주 영스타운에 있는 말발굽 모양의 조립 라인에서는 오차 없이 각 구간마다 60초의 택 타임(takt time)을 두고 엔진 부품이 컨베이어 위에서 시계처럼 움직인다. 엔진 크래들 하위 부품이 생산라인의 끝에 도달하면, 조타 장치 와이어 벨트 커넥터 같은 중요한 것을 포함하는 각 하위부품이 완전히 장착되고 고정되어 있는지를 검사해야 한다.
콤프리헨시브 로지스틱스사에서 부가 가치 부품 조립 감독인 마이크 오키프는 "가끔 연결이 느슨하거나, 연결은 되었어도 제자리에 고정되어 있지 않은 경우, 조타 장치가 손상될 수 있다. 이는 심각성 규모 레벨 8 수준"이라고 말했다. 그는 "산업 전반에서 수동 검사는 효율성이 80%에 불과하기 때문에 자동화 시스템을 통해 반복해도 일관적인 품질 검사를 찾고 있다"고 말했다.
회사는 대안을 연구하기 시작했다. 솔루션은 콤프리헨시브 로지스틱스의 가동 시간에 대한 요구사항을 충족해야 하고, 사용이 간편해야 하며, 프로세스와 직원을 쉽게 통합할 수 있어야 했다.
오키프는 "유니버설로봇에 대해 알게 됐고, 로봇이 비전 카메라를 안전하고 반복적으로 올바른 위치에 옮길 수 있는, 비용 효율적이고 부담이 적은 로봇이라는 것을 깨달았다. 유니버설로봇의 능력 덕에 임무 수행에 필수적인 검사를 반복적으로 해도 100% 일관된 결과를 얻는 것이 가능해졌다"고 말했다.
천장에 장착된 유니버설로봇의 UR10 협동로봇은 비전 카메라를 장착하고 검사 지점 사이를 빠르게 이동한다. 이후 각 연결부의 사진을 찍은 후 정위치로 돌아가, 다음 부품 검사까지 기다린다.
오키프는 UR10이 엔진 크래들 검사를 수행하게 된 이후 달성된 가동 시간을 강조한다.
그는 "UR10은 현재 2년 동안 2교대 또는 3교대로 24시간 내내 가동되고 있다. 새로운 엔진의 구조에 맞출 수 있어 미래에도 사용이 가능하다. 고객이 새로운 요구 사항이나 다른 검사 기준을 제시하더라도 이런 품질 검사 포인트들을 프로세스에 쉽게 추가할 수 있다“고 말했다.
유니버설로봇은 협동로봇으로 분류되며, 로봇 팔이 경로 내에서 물체나 사람을 인지하면 자동으로 작동을 멈추는 안전 시스템이 내장되어 있다. 이는 콤프리헨시브 로지스틱스가 공정 내 UR10을 직원 바로 옆에서 전개할 수 있다는 것을 의미한다.
오키프는 "업계에서 일반적인 로봇 시스템 대부분이 필요로 하는 거추장스러운 조명 커튼이나 다른 유형의 안전 가드가 필요하지 않다" 며 쉽게 시작하고 도중에 멈출 수 있는 로봇의 능력을 강조했다.
검사가 중단되면, 사이클 내에서 중단되었던 부분만 다시 점검하면 된다. 독립적으로 운용되는 로봇의 경우, 일반적으로는 전체 프로세스를 다시 실행하므로 사이클 시간이 초과하게 된다.
오키프는 "콤프리헨시브 로지스틱스에 더 많은 조립 공정이 생긴다면, 고객이 100% 확실한 품질이 보장되어야 하는 중요한 업무 부분 검사 요구가 있을 경우 잠재적으로 이 프로세스를 다른 라인에서 그대로 적용 할 수 있다" 고 말했다.
